Descrizione dell'applicazione
CONTROLLO MERENDINE
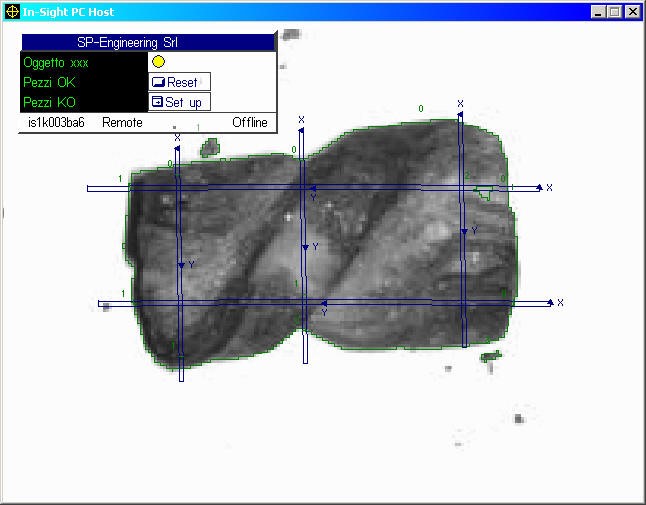
In una linea di produzione merendine, deve essere inserito un controllo automatico relativo all’aspetto estetico del prodotto. Attualmente il controllo avviene a mezzo di operatori che valutano in modo esclusivamente “soggettivo” se l’aspetto del prodotto e congruo con l’aspetto “atteso” dal consumatore. La richiesta pervenutaci consisteva nella realizzazione di un sistema in grado di valutare sia i parametri “geometrici” del prodotto che quelli estetici relativi al grado di cottura ed alla uniforme distribuzione della granella si zucchero sulla superficie.